Fan Jingchang 1 Zhao Bo 2 Xu Jinfeng 2
(1. Fan Jingchang China Kunlun Engineering Corporation, Beijing 100037, China)
(2. Zhao Bo, Jiangsu Ankerui Electric Manufacturing Co., Ltd., Jiangyin 214405, China)
(2. Xu Jinfeng Jiangsu Ankerui Electric Manufacturing Co., Ltd., Jiangyin, Jiangsu 214405)
Abstract : A special submersible pump protector is designed to meet the characteristics of submersible pumps. The submersible pump protector has such protection functions as overload, phase failure, unbalance, overvoltage, undervoltage and voltage unbalance. Given the design principle of this type of product, the difference between the product and the conventional motor protector and its hardware and software design principles are described.
Keywords: submersible pump protector controller
0 Preface
Submersible electric pumps are medium pressure mechanical oil extraction equipment used in oil fields. With the improvement of the degree of automation in oilfield development, the original submersible pump has limited functions such as imperfect function of leakage leakage, inconvenient data analysis, no waveform record, and no communication function. The main cause of these deficiencies is the non-specific targeting of submersible oils. Electric pump protectors do not support the above functions.
At present, there are few domestic manufacturers who research and develop submersible electric pumps, and the scale is small. The products have not formed series and scale. In order to enhance the competitiveness of domestic submersible pump protectors and make up for the insufficiency of old-fashioned protectors, it is necessary to develop a targeted submersible pump protector.
1 Difference between submersible pump protector and motor protector
2 submersible pump protection features
3 submersible pump protection product composition
Submersible pump protector consists of protector body, human-machine interaction module and switching power supply, as shown in Figure 1. The protector main body completes the parameter acquisition, protection, and communication functions; the human-machine interaction module realizes real-time parameter display, parameter setting, real-time curve display, history curve display, history data query, fault query and other functions; switching power supply will AC/DC 220V (or Other levels) The voltage is converted to low voltage for use by the mainframe and the human-machine interaction module.
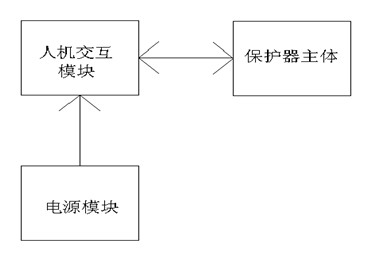
Figure 1 Schematic diagram of submersible pump product composition
4 Design of submersible pump protector
The design of submersible pump protection is divided into hardware and software. Hardware design includes power supply, signal acquisition, digital input and output, and communication circuit. Software design mainly includes software architecture, measurement algorithm, protection algorithm and control algorithm.
4.1 Hardware Design
Since the commonly used submersible pump operating voltage from AC 200V ~ AC2000V, it is not appropriate to work directly on the submersible pump power supply as a working power supply submersible pump protection, the conventional practice is to use an isolation transformer to convert the working voltage of the submersible pump to AC 110V control voltage. In view of this situation, the power supply of the submersible pump protector adopts the switching power supply. This is because the switching power supply has a wide working range and high efficiency, and is suitable for this situation.
Signal acquisition includes voltage, current and other electrical parameter acquisition. In order to ensure the reliability of the acquisition, TV and TA are usually used as isolated converters for voltage and current signals. When using TA, pay attention to the TA voltage level. The conventional TA voltage level is 0.66KV. When the operating voltage of submersible pumps reaches AC 1000V or even AC 2000V, 3.3KV TA should be used to ensure isolation safety.
The design of the digital input and output and communication circuit is a conventional design without too much speciality.
Reliability design includes electromagnetic compatibility and safety design. In the initial stage of electromagnetic compatibility design, various possible problems should be fully considered and planning for reserved measures should be made. Commonly used anti-jamming methods include: the power supply part plus EMC filter; signal acquisition part to increase the filter circuit; in the signal processing of the input port of each chip plus port protection circuit; in the chip power supply input tantalum capacitor and so on.
4.2 Software Design
The commonly used sampling algorithms are DC sampling and AC sampling. AC sampling can measure non-sinusoidal signals and is therefore widely used in electrical parameter measurements. Common measurement algorithms are sine-based and non-sinusoidal. Algorithms based on sinusoidal signals include half-weekly maximum absolute value algorithm, half-period absolute integration algorithm, first derivative algorithm, second derivative algorithm, sampled value product algorithm, three sampled value algorithm, etc.; algorithms based on non-sinusoidal signals include Fourier Algorithms, first-order differential post-half-wave Fourier algorithms, true rms algorithms, etc. Various algorithms have their advantages and disadvantages. Although the algorithm based on the sine signal is simple and consumes little resources, it is inaccurate when there are harmonics or waveform transformations, while the algorithm based on non-sinusoidal signals can guarantee the correctness of the measurement value although the algorithm is more complex.
Due to the difficulty in designing the inverse time curve algorithm in the protection algorithm, some products are marked as inverse time limit, but the actual is a definite time segmentation, such as: (1.2-1.5) times, 60s protection, (1.5-2) times, 40s Protection, more than 2 times, 10s protection. This violates the basic principle of the inverse time curve. If the signal jumps up and down at the critical point, the action time will not be accurate. The true inverse time limit has a continuous inverse time curve, so that it is truly large and large, and small and small.
When software design, in addition to the need to select a reasonable algorithm, but also pay attention to the standardization of software design. The basic principles of software design are information hiding and module independence. Good software requires high cohesion (cohesion is a measure of module strength) and low coupling.
Software testing is an indispensable part of software design. Its purpose is to verify whether the software meets the requirements. During the development process, Chinese medicine follows the principles of early testing and early correction, and after unit testing, integration testing, confirmation testing, and acceptance testing are performed.
5 Conclusion language
Submersible electric pump is a new type of motor protector derived from conventional motor protector products. It is more suitable for submersible pumps, and new anti-time limit protections such as underload, overvoltage, undervoltage, current imbalance, and voltage imbalance. At the same time with current, voltage, power, frequency, electrical energy, residual current and other measurement functions, more in line with customer requirements.
The article comes from: "Electrical Engineering", 2013-12.
references
[1] Jia Xinrui, Wang Zhuo, Shi Jianpeng. Development of energy-saving device for submersible electric pumps[J].Inner Mongolia Petrochemical Industry, 2012,(1):83-85.
[2] Zhao Junwei, Lu Xiaoyun, Zhang Dong. Design of Intelligent Control Cabinet for Submersible Electric Pump[J]. Science Technology and Engineering, 2012,(7):1645-1647.
[3] Wang Luyang, Wang Yuxing. Industrial electrical equipment [M]. Beijing: China Electric Power Press, 2006
[4] He Huanshan. Factory electrical control equipment [M]. Beijing: Higher Education Press, 2004
Submersible pump protection is a subdivision of motor protection. In the functions of measurement, protection and communication, the submersible pump protector and the motor protector are basically common, but the various protections of the submersible pump, such as underload, current imbalance, overvoltage, undervoltage, etc., are often used in reverse. Time limit type, and these protections use definite time limit types in general motor protectors. Submersible pump protectors need to have historical data records and export functions, while conventional motor protectors have fault records. In order to facilitate the maintenance and evaluation of the submersible pump, the submersible pump protector must be equipped with a punching function in order to carry out the check-in, and the conventional motor protector does not have to carry this function. Submersible pump protector can measure three-phase current, three-phase voltage and frequency in real time, and can display active power, energy and other electrical parameters at the same time; can detect, collect the switch type process parameters, 4-20mA type process The parameters are sent to the system through communications. The submersible pump protector has the functions of overload, phase failure, current imbalance, stall, blocking, undervoltage, overvoltage, voltage imbalance and other protection functions, and can achieve underload self-start. The submersible pump protector can display real-time and historical curves of three-phase current, three-phase voltage and other parameters. The submersible pump protector can export the stored historical data to the U disk, and the export file supports EXCEL operation. After the U disk is inserted into the computer, data analysis can be performed directly without additional analysis software. This function can be used to replace the current recorder. The submersible pump protector supports MODBUS and PROFIBUS communication protocols. It can directly transmit real-time data and send start and stop commands through the communication network.A needle roller bearing is a special type of roller bearing which uses long, thin cylindrical rollers resembling needles. Ordinary Roller Bearings' rollers are only slightly longer than their diameter, but needle bearings typically have rollers that are at least four times longer than their diameter.Like all bearings, they are used to reduce the friction of a rotating surface.
Compared to Ball Bearings and ordinary roller bearings, needle bearings have a greater surface area in contact with the races, so they can support a greater load. They are also thinner, so they require less clearance between the axle and the surrounding structure.
Needle bearings are heavily used in automobile components such as rocker arm pivots, pumps, compressors, and transmissions. The drive shaft of a rear-wheel drive vehicle typically has at least eight needle bearings (four in each U joint) and often more if it is particularly long, or operates on steep slopes.
Needle Roller Bearings,Steel Needle Roller Bearing,Double Row Needle Roller Bearing,High Precision Needle Roller Bearings
Ningbo Ritbearing Imp & Exp Co.,Ltd. , http://www.nbbearing.de